 |
発電実験:発電機励磁装置 | 元に戻る |
| Ⅳ.発電試験装置の製作と試験 2024/7/2 |
|
| |||||||
|
1.模擬発電機の作成 2.発電機の特性試験 3.回転子へ励磁電流を供給する方法 4.励磁回路(A/D変換)と電圧発生試験 5.発電機励磁装置の動試験 (インデンシャル応答) 6.将来試したい回路 |
|
| 本 文 |
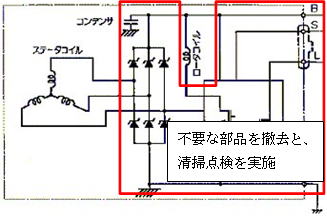
| 1.模擬発電機の作成 本自動電圧調整装置から発電機を励磁して、その発電特性を取るため、発電機とモーターからなる試験装置を製作した。 (1)発電機について 励磁装置の試験の為に、発電機として安価な車の発電機(内部は同機三相交流発電機で、内部で直流に変換している)を改造して固定子及びコレクターの端子を引き出し、試験に使用する。 分解前の発電機
一般的なIC型電圧調整装置発電機 回路図
購入品のリスト
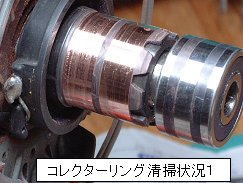
分解 組み立て時にブラシに注意が必要、コレクターリングの手入れが必要!
最終分解状況
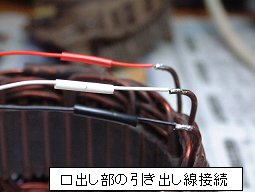
口出しの部の引き出し線は今回負荷試験をしないため、細い線で引出しを行った。
組立
試験用駆動モータ モータ入荷 発電機より大きいが出力60Wの誘導電動機 プリーの加工中
発電機試験装置の完成
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||




























| 2.発電機の特性試験 (1)発電機の特性試験 1 励磁試験 DC電源発生器により励磁し、その時の発電機の特性を計測する。 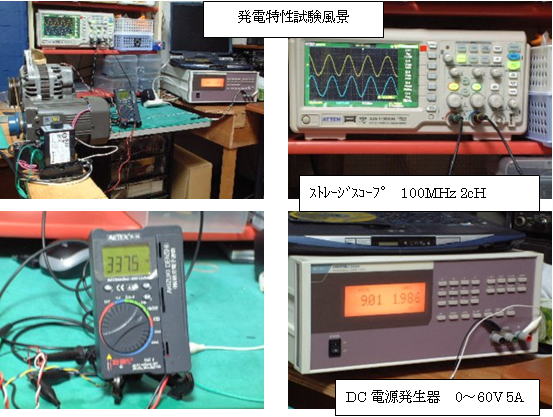 測定日 2012年6月23日 気温 25.4 (℃)
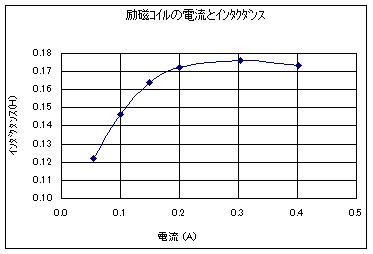
 発電電圧 周波数測定 ATTEN ADS1102CAL 100MHz 1GSa/s DIGITAL STORAGE OSCILLOSCOPE モータ回転速度 周波数計 METEX P-10 電圧発生器 IWATSU SP6005P 60V 5A PROGRAMMABLE POWER SUPPLY (2)発電機の回転子のインダクタンス測定 スライダックと電圧・電流を測り、60Hzでのインダクタンスを計測する。 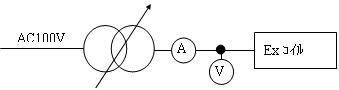 スライダック 東京理工社 100V 0-130V 5A(MAX) 電流計 HIOKI 3256 レンジ (mA) 電圧計 METEX P-10 測定日 2012年7月7日 気温 28.4 (℃) 抵抗値 4.1 (Ω)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

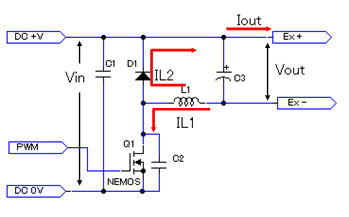
| 3.回転子へ励磁電流を供給する方法 PWMで電力をコントロールし、FETのアンプにより励磁コイルに励磁電力を供給する方法は2つ考えられる。
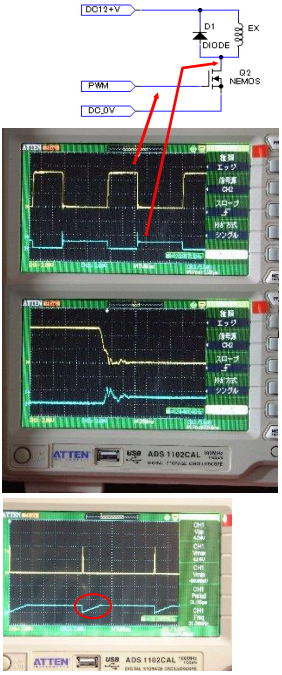
今回は以上2ケースの回路を使用して、対応策も含め検討して見たい。 まずは、励磁コイルを直接ドライブする方法について説明したい。 電源の電圧調整方法の違いからくるアンプ回路(超概略)の違い『Ⅱ.自動電圧調整装置の概要2.電圧調整装置の動作概要で説明したb.スイッチングレギュレータ型でサイリスターを使用した調整装置の概略説明をしたが、今回はFETを使用し電流0の所で電流を切らないため下記の様になる。 図左については、NMOSのゲートには、連続する(①~②にリニアで)制御信号が入力されるので、(D)-(S)についても連続する電流が流れる。しかし、右図の回路では、NMOSのゲートには、パルス信号が入るため、インダクタンス負荷の場合、パルス信号がH→Lの時に発生する②逆起電力が(D)-(S)間耐圧より大きくなるとFETが破損する事から、D1と言う物を入れ、その電力を消費させる③の所が違いとなる。 コイルから見れば、この逆起電力の電流方向は、FETがONになっている時と同じ方向なので、この電流をうまく流す事により、損出を減らす事が出来るが、ダイオードには、順方向電圧(約0.6→電流により上昇し1V以上になる事も有る)が必要となり、逆起電力によるEXで消費する電力から見るとこれが、熱損失となり、効率低下となる、又影響は少ないが、FETの(D)-(S)間耐圧について、電源電圧+D1の順方向電圧が加わる事になる。 このため、実際の回路では、D1の代わりにFETによりスイッチする事も考慮する。 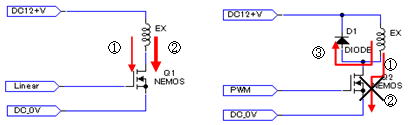
|
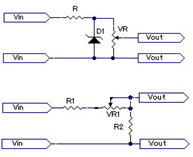
| 4.励磁回路(A/D変換)と電圧発生試験 A/D入力の回路の検討が必要でしたが、回路図は下記のとおりとした。  (1)A/D変換回路 今回の設計条件として、 ・ 入力電圧調整用の抵抗を調整時にPICを破損させない回路とすること。 ・ A/D側の最大許容電圧は5.5(V) 。(PICデータシートより) ・ A/Dから見た電源側のインピーダンスを10kΩ以下とする。(PICデータシートより) ・ 抵抗の最大許容消費電力の1/5程度とする。(経験値) ・ 最大計測電圧値と調整範囲 測定値は20.48(V)で±5(%)以上の調整範囲とする ・ 入力電圧の最大は25(V)が装置に入っても制御回路が故障しない事。 ・ 手持ちの表面取り付け型、半固定の抵抗を使用する。10kΩ,20kΩ,50kΩ
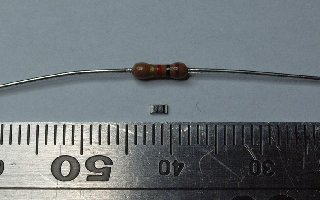
最大許容電力は、手持ちの抵抗は1/10Wなので、1/50W=20mW程度で設計する。 上段の抵抗がリード線タイプの1/4W抵抗下が表面取り付けタイプの抵抗1/10Wで何れも1kΩです。
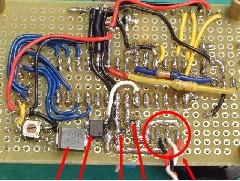
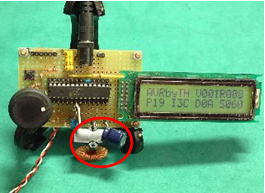
ただし、データシート380Pを見ると『特性解析されたものですが、検証されていません。』と値が記載されていないので、注意が必要。(初期化の時にフラグを見て待つ必要があるかも・・・) 計算結果 入力側抵抗 10 kΩ 可変抵抗 500Ω 直列抵抗 1kΩ 回路を追加した裏面基板状況
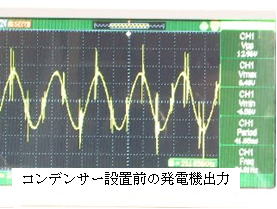
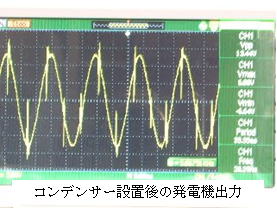
(2)電圧発生試験 試験状況 発電機出力 EXコイル 元電源(黒)   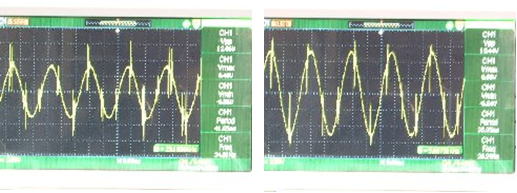 対策前の発電機出力波形 ちょっとした対策後 スパイクノイズが減少し正弦波の電圧が上昇した。 正弦波の周波数は50~80Hzの中に入っており、PWMの周期は32(us)だったはずなので、このスパイクノイズはどうして生成されているか??? 原因究明が必要! PWMの信号を確認する
■設計再確認
 [目次に戻る] |


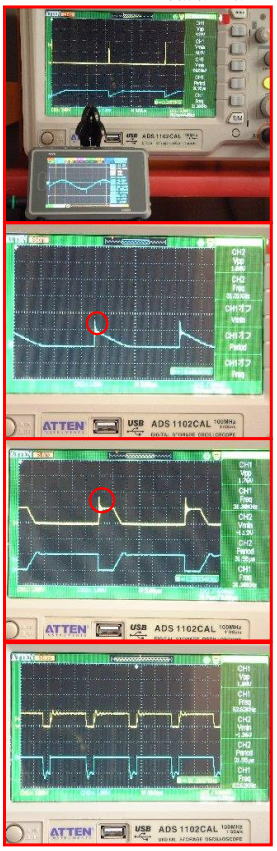
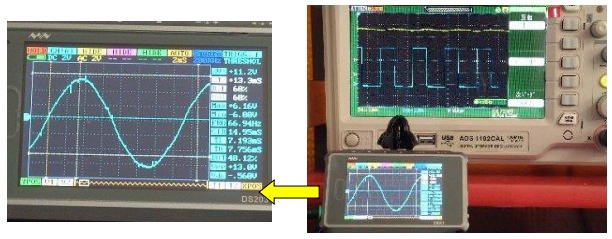
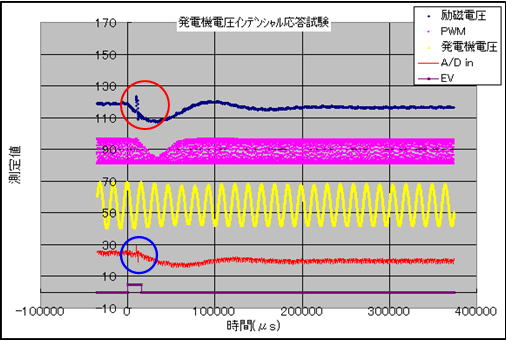
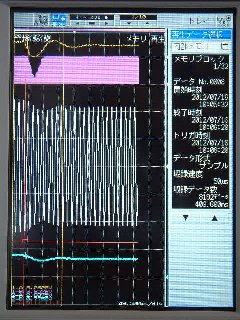
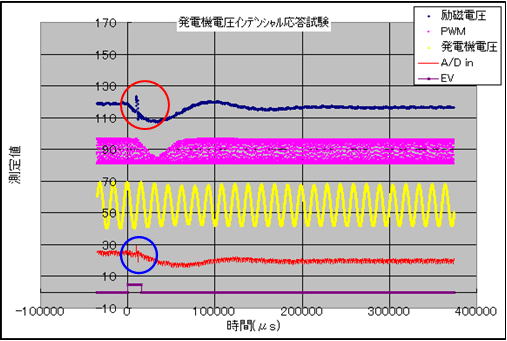
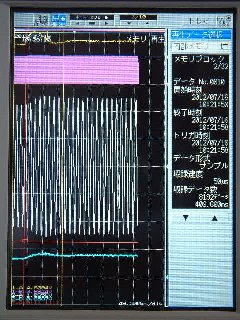
| 5.発電機励磁装置の動試験(インデンシャル応答) まず、先に記載の仕様データしか無いため、AVRを使用しない試験の後、AVRの出力FETの仕様を決定し、回路設計・製作後、AVRを使用した試験を実施する。 次に、今回の試験はこの発電機の試験ではなくAVRの試験であることから、無負荷状態とできれば、モータの出力以内の発電機出力で試験をする。 ・試験日 2012年7月16日10:30~ ・気温 33.4℃最終34.5℃ 晴れ ・測定器 記録オシロ NEC omniaceⅡ RA1300R サンプリング時間50 (μs) 直流電源 IWATSU SP6005P 電圧測定 METEX P10 ・90R,90Sの設定 180(384),140(320) 20%の変動 (1)下降インデンシャル応答試験 試験状況と 試験結果(オシロ写真)
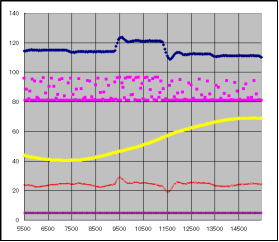
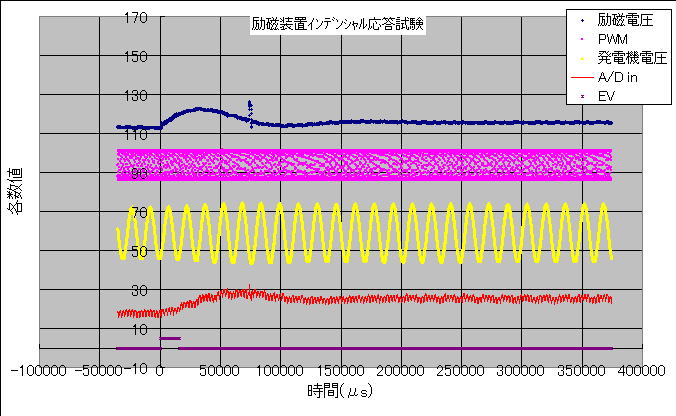
(2)上昇インデンシャル応答試験 試験状況と 試験結果(オシロ写真)
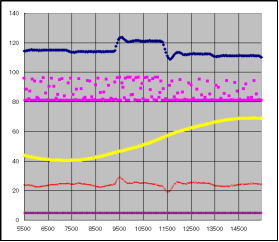
オシロの電子データをエクセルでグラフ表示
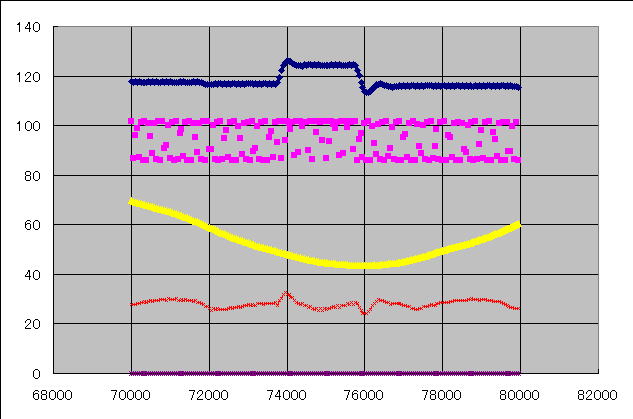
(3)上昇インデンシャル応答試験 試験状況と 試験結果(オシロ写真)
オシロの電子データをエクセルでグラフ表示
|



| 6.将来試したい回路 今後モータの制御も行うことから、下記内容の制御も検討して行きたい。 D1の代わりにFETを使用する概略回路 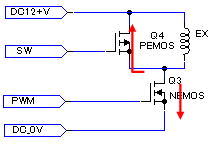 ●電源側にコイル負荷を接続する方法 ●電源側にコイル負荷を接続する方法FET置きかえた場合は、コイルと並列するSWは方向が逆となるため、PMOSを使用します。 しかし、入力がDC12V程度で有れば良いのですが、入力電圧が高圧になればなるほど(S)-(G)間電圧差が大きくなり制御信号の回路も難しく(NMOS側の制御と絶縁し尚且つ-電源を作る必要が出てくる)なります。 ●FETで直接EXコイルをドライブしない方法(可変速機) 次ぎページの回路を参照してほしい、EXコイルには、連続した電流を流す様にするため、EXコイルを右側、『DC+_OUT』『0_OUT』間に接続し、連続する電流を流す、PWMで制御する直流の安定化電源で供給する回路へ変更する。 この事により、高効率のリニアな制御が可能となる。 下と上のFET制御回路を絶縁または、高抵抗化する必要が出てくるが、単一電源で制御が出来るIC(IR2111)を使用する事により、上記回路から見れば、簡単になる。 ただし、リップルを小さくするために使用している回路上のL1はQ1,Q2でPWM及びSWによる制御で入り切りをするため、上記のEXと同じ逆起電力を発生しているので、この事については、同じ損失を少なくする必要が出てくる。 では実際の回路設計(簡便)に挑戦して見る。 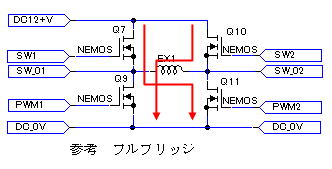 今回の回路は、励磁装置から見れば、SWになるFETが片側だけのため『ハーフブリッジ型』のPWM安定化電源回路と言える。(フルブリッジについては参考図を参照) ●高効率励磁回路 ZVS(Zero. Volt Switching)方式の電源装置の設計方法について 先に説明した回路に加え、FETの(D)-(S)間にコンデンサーを入れる事により、効率向上を図るためにZVSと言う方式を採用したい。 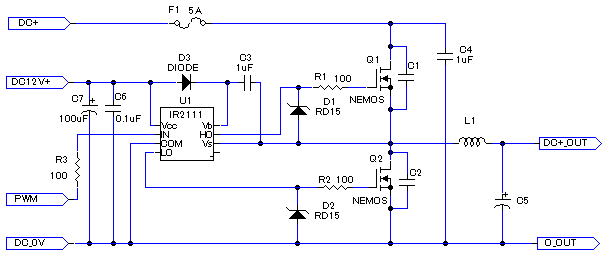 [目次に戻る] |