 |
発電実験:発電機励磁装置 | 元に戻る |
| Ⅱ.自動電圧調整装置の概要 2024/7/2 |
|
| |||||||
|
1.回路構成 2.電圧調整装置の動作概要(PWM) 3.PID 回路 4.電圧検出部 A/D コンバータ 5.電圧設定回路 |
|
| 本 文 |
| 1.回路構成 本装置は、PWM(Pulse Width Modulation:パルスのデューティサイクルを変化させる)を用いた直流の電圧調整装置です。 回路構成の概要としては、  ① 電圧設定回路 ① 電圧設定回路(値はダイヤル3.④で設定 LCD) ② 電圧検出部はデジタル信号に変換するA/Dコンバータを使用しています。 ③ ①と②の値差をPID処理して、PWM回路に制御信号を出力する回路 ④ 電圧調整装置は制御信号値によりPWM信号を出力し、出力電圧を発生調整します。 となっており、内容を以下④PWM回路から逆に説明する。 [目次に戻る] |
| 2.電圧調整装置の動作概要(PWM) PWM回路説明の前に、電源装置として他の制御方法も先に紹介する。 (1)電源装置には、シリーズレギュレータ型とスイッチングレギュレータ型があります。 a. シリーズレギュレータ型 負荷に直列に制御するトランジスターが接続され、トランジスターの抵抗値を制御する事により、不要な電圧(電力)をトランジスター(図のQ1)で消費させ出力を制御する物で、説明通り熱が出るため、大きな出力を出す事が難しい(素子が高価)物です。 又不要な電圧部分を直列に入ったトランジスターで消費するため、電源装置の効率が悪いのが、難点です。 グラフはトランジスターQ1の両端の電圧を現したものですが、入力と出力の差がQ1で消費された電力(熱)です。 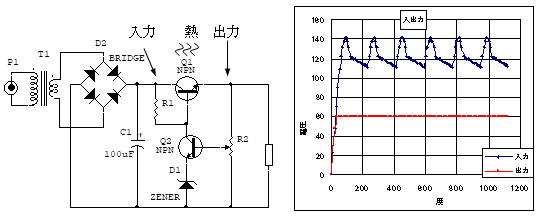 但し下記で説明するスイッチングレギュレータと違いノイズは非常に少ない電源装置です。 この電源装置の電圧検出回路は負荷側に接続されているので、AVRとして、発電機の電圧調整をする場合は、電圧検出部を発電機電圧に変更する必要がある。 b. スイッチングレギュレータ型 サイリスターはトランジスターの様に素子内部の抵抗を変化させる事が難しい反面高電圧のスイッチとしては優れていました。 現在言われているスイッチング電源には、最近までAVRで使用されていたサイリスターも含まれると思いますが、サイリスターには条件があり、入力は交流でなければなりません。なぜかと言うとサイリスターはスイッチとして入りは出来ますが、電流が流れている状態で切ることが出来ないため、必ず入力側で0電流になる交流が条件となっていました。 図は正負共に入りできるサイリスターを2つ合せたトライアックと言うものを使用しています 回路例は、電圧を調整するのではなく、トライアックの入りするタイミングを一定にする回路で、電圧を一定にする回路ではありませんが、簡単に以下説明します。 電圧検出部のトリガーダイオードの動作電圧VBOより入力電圧が高くなるとQ1のトライアックへ入り信号を出します。 検出部のC1は電源位相90°~180°についてもトライアックの入り信号が出るように、検出部から90°遅らせるために取り付けられています。 電圧を一定に制御するには、調整したい電圧を大体R2回路等へフィードバックしてやれば良いことが判ると思います。 また表は90°で入り制御をした場合の入出力波形です。 損失はシリーズ型に比べ小さく通電状態の素子の最低抵抗値となるため、表の緑線部分しか有りません。 後に自己消弧が可能なサイリスターGTO素子が出たため、入力が直流でも制御が可能となり、又出力も今まで、入力と同じ周波数で入り切りしていた物が、高い周波数で入り切りする事が出来るようになり、コイル関係を小さく出来、又調整および反応も早くする事が出来る様になりましたが、その分ノイズ対策が必要となっています。 このスイッチング型の一つとしてPWMと言う方式があるのですが、この方式も幅を調整して電力を変化させているので、大枠PWMと言えると思います。  注意:この回路で、ダイオードブリッジ、R3,R4の回路はC1に溜まった電荷を次のトライアックONまでの間に、放電する回路です。 位相調整により、R2が高い抵抗になった場合、この回路をつけることにより、トライアックのON信号を正確に早く出すことが出来ます。 なおサイリスターは電流0で切る事から、コイルの逆起電圧から見ると、以下に説明する方形波と比較すると、低くなる。(起電圧対策は不要かも) サイリスター制御については、『Ⅶ.その他(参考資料) 1.サイリスター制御について』を参照下さい。 (2)PWM の原理 入力は直流として説明します。 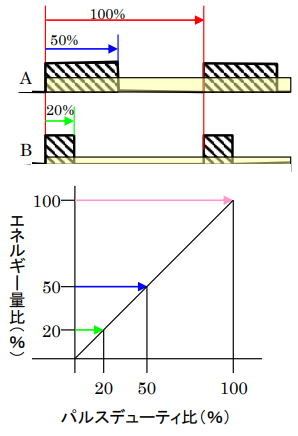 PWM の電源装置の出力は方形波で、H(ハイ又は ON)の時の電圧は一定ですが、H,L(ロー又は OFF)の時間的割合を変え、供給する電力を調整する事により、負荷に加わる電圧を調整するものです。 PWM の電源装置の出力は方形波で、H(ハイ又は ON)の時の電圧は一定ですが、H,L(ロー又は OFF)の時間的割合を変え、供給する電力を調整する事により、負荷に加わる電圧を調整するものです。出力信号として A の ON-OFF 信号を出力した場合、一周期(赤矢印)を 100(%)とした時 ON と OFF の割合は同じ 50%となっています。この ON,OFFパルスの比をデューティー比と言います。 ON、OFF を平均すると黄色の部分になり、そのときの高さは 50%になります。 PWM の出力をコイルの充放電によりデューティ―比分を負荷へ供給されます。 従って、出力信号が B の形になった場合は、ON が20%なので、供給されるエネルギー量も 20%となります。 この関係を示すと右の表になります。パルスのエネルギー量はパルスの立ち上がっている面積(斜線部)なので、パルスのデューティ比とエネルギー量は比例しています。 これを利用し、出力電圧と、基準電圧を比較し、低ければパルスデューティ比を上げ、高ければ、デューティ比を下げる様 PWM 回路へ制御信号を出力する事により電圧を制御する事が出来ます。 制御信号によりPWM信号を出力する訳ですが、実際発電機で使用する場合は、励磁変化から発電機電圧変化までに、時定数による遅れがあるので、安定化させるために制御信号を工夫する必要があります。この工夫が PID (制御信号を比例、積分、微分計算したアンプを通して制御信号とするもの)で、PID は次項で説明します。 出力電圧は、消費される電力量と PWM の ON,OFF のデューティ比で変化させる(安定させる)事が出来ます。 ちなみに、ON 信号は約 5V ですが、ディーティ比を変化させる事により出力が変化する例として、下記に示します。 左写真が出力 0.5V で PWM 信号が赤矢印の部分です。 又右が出力 1.33V の状況です緑矢印の出力電圧が高い方が、PWM信号のON パルス巾が広くなっているのが判ると思います。 方形波の 0 電位で一定周期の交流波が出ているようですが、その事については、後で説明します。(PWM の出力回路の LC による共振と思われますが・・) 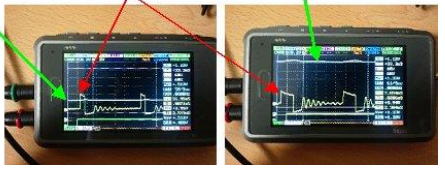 [目次に戻る] |
| 3.PID 回路 先の PWM の制御信号としては、検出された電圧に対し、設定電圧の差および差の変化量をそのまま制御信号として出した場合、遅れなくフィードバックされる場合は、都合良く制御出来ますが、この世の中に、制御~出力に遅れが無いものなど有りません。 そこで制御から出力を出来るだけ早く安定できるように様に制御信号を加工する方法が PID です。 PIDについて 自動制御方式の中でもっとも良く使われる制御方式にPID制御という方式があります。 このPIDとは P:Proportinal(比例) I:Integral(積分) D:Differential(微分) の3つの組み合わせで制御するもので、制御される物の応答が遅い場合などは特に、PID 制御で、スムーズな制御が可能となります。 では PID を個別に説明し、3 つの PID 要素が必要で有る事を説明します。 (1) 比例制御 目標値と現在値との差に比例した大きさを操作量とする方式を比例制御と言われています。 偏差×比例ゲイン=比例制御信号 しかし偏差が無いと制御信号が出ないため、必ず目標値と差が出た所で安定します。 又比例ゲインが 90%(電圧出力=100%制御信号)以上になると安定するのに時間がかかり、100%で 0~100%を繰り返す 100%以上では、拡散する。 目標値は 200 で、0→安定までの状態で、比例ゲイン 50%、100%のシュミレーション(制御→出力の時定数=0)グラフを右表に示します。 比例制御だけでは、うまく制御が出来ない(安定値が目標値と比例していない)事が判るとおもいます。 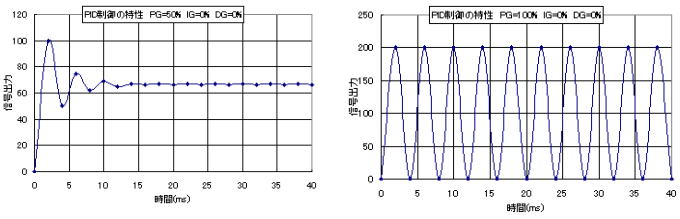 (2)積分制御 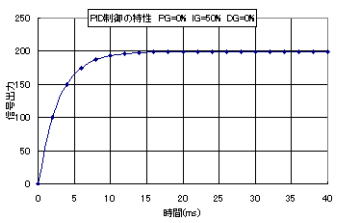 偏差×積分ゲインの信号を累積するので、最初の部分が比例制御と良く似ていますが、制御信号として先の信号を累積して出力する所が比例と積分の違いです。 偏差×積分ゲインの信号を累積するので、最初の部分が比例制御と良く似ていますが、制御信号として先の信号を累積して出力する所が比例と積分の違いです。グラフは、比例制御をやめ、積分制御信号だけで、シミュレーションしてみた結果、積分制御だけで、早く安定(16ms で安定)していますがこれは、制御~出力の時定数が 0ms のためです。 もしこの時定数が遅れ2ms有る場合は下記の様に安定に 34ms必要になってしまいます。 これを積分ゲインをそのままに比例ゲインを増やし安定に必要な時間が最小となるのは、比例ゲインを 14%にした場合で、安定に必要な時間は 28ms と 6ms 短くなります。 つまり、単一の制御でなく、複合(比例+積分制御)にする事により、より良くなる事が判ります。 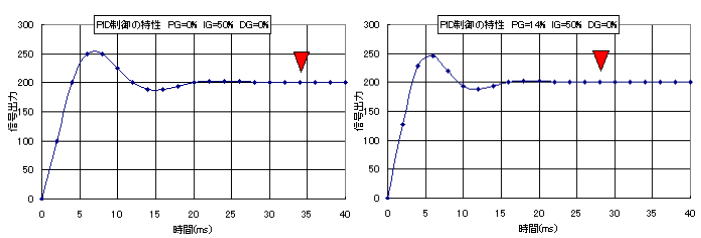 (3)微分制御 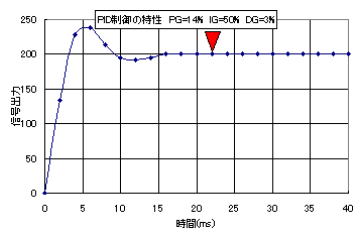 比例と積分だけでも、早く目標値に近づ ける制御はできますが、もっと早く制御す るためには、微分制御を加えることです。 比例と積分だけでも、早く目標値に近づ ける制御はできますが、もっと早く制御す るためには、微分制御を加えることです。微分制御は差の傾き(前回の差と今回 の差の差)により信号を生成し、その信号を PI 信号に加える事により急変の対応を 早くさせ、安定させる働きをします。 しかし大きくしすぎるとレーシングの元 になるので、注意が必要です。 制御時定数遅れが 2(ms)とし P=14% I=50% D=3% とした場合、 最短 22ms で安定し、なおかつ最大出力値が 246 → 238 と 3%減になります。 [目次に戻る] |
| 4.電圧検出部 A/D コンバータ PID 制御の元になる信号が基準電圧値(次に説明する)と、この電圧検出で得られた値です。 今回は信号処理をディジタルで処理するためアナログをディジタルに変換します。 (1)A/D 回路の概要 本装置の A/D 回路は逐次比較型だが逐次比較型の回路構成は、大きく分けて3つの回路に分けることができます。 ① 電圧発生器(D/A) ② この電圧と入力電圧を比較する比較器、 ③ 比較中に入力電圧が変化しないよう、アナログ入力電圧をホールドする回路で構成されます。 変換は、入力と、A/D 内部のデジタル電圧発生器の出力を 1bit ずつ下げて行き比較し(したがって n bit の場合は 2n回の比較を行う必要があります。この比較器1つを用いてループ状に2n 回の操作を行う場合を逐次比較型と言います。)合った時のデジタル値を変換値とします。 1 回の変換のために何度も入力を参照する必要があり、その間に入力電圧が変動すると誤変換をしてしまうので、変換が完了するまでの一定時間だけ入力電圧を固定する回路(サンプルアンドホールド回路)が必要となります。 A/D コンバータとしてこの他に、フラッシュ型(並列比較型)、傾斜型および追従型、二重積分型(二重傾斜型) 、VF 変換型、デルタ・シグマ型がある。 [目次に戻る] |
| 5.電圧設定回路 PID の説明で、発生した電圧と本電圧設定値を比較し、その差(比例や積分)や差と差の差(微分)を使用し電圧発生装置へ信号を出すことが判ったと思います。 電圧設定回路については、アナログ処理のころは、可変抵抗器で発生していたことも有りましたが、本回路では、全てデジタル処理しているため、この電圧設定回路はデジタルの値を記録する場所を確保しているまたは、値を入力できるようにしている事を説明するだけなので、その操作説明については、『Ⅰ.今回製作した自動電圧調整器 1.概観説明~3.操作』で説明した通りです。 設定につていは、電圧設定の他に PID の設定値やインデンシャル応答に使用する変化電圧値などを設定出来るようにしています [目次に戻る] |