 |
部品実験:Arduino | 元に戻る |
| BME280 2024/7/30 |
|
| |||||||
|
1.データ取得 2.概要 |
1.BM280ハード(本文以外) 2.Arduino全般目次 3.Arduino日本語リファレンス。 |
| 本 文 |
| 1.データ取得 下のプログラムを実行することによりシリアル通信のモニターに結果が表示される。
Arduino Program Source download [目次に戻る] |
| 2.概要 (1)仕様
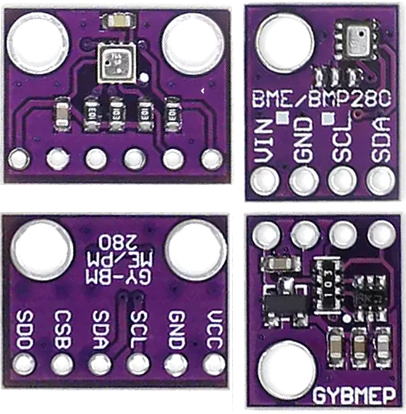
(2)ピン
|
|
部品実験:Arduino | 元に戻る |
| BME280 2024/7/30 |
|
| |||||||
|
1.データ取得 2.概要 |
1.BM280ハード(本文以外) 2.Arduino全般目次 3.Arduino日本語リファレンス。 |
| 本 文 |
| 1.データ取得 下のプログラムを実行することによりシリアル通信のモニターに結果が表示される。
Arduino Program Source download [目次に戻る] |
| 2.概要 (1)仕様
(2)ピン
|